 |
 |
|
SAE J2735-Draft-Rev28 [issued: 11-10-08]
-
307 -
This is an SAE Motor Vehicle Council draft document of the DSRC committee, subject to change.
3.
The overall framework of the MAP
The MAP message is used to convey a number of different types of maps in support of DSRC messages.
Some of these remain to be defined in future editions of the standard. However, the “intersections” or GID
portion of the map is defined and is used along with the SPAT message to relate information about
intersections.
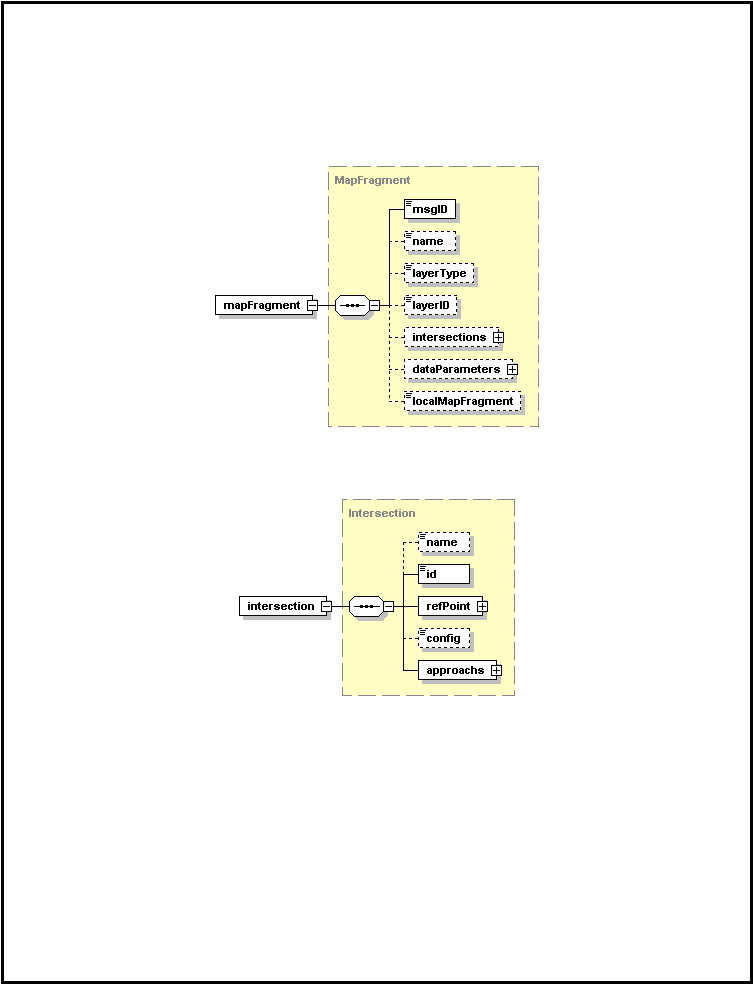
The intersection data frame, shown below, is used to relate all the needed physical geometry of an
intersection, and to assign numbers to specific lanes (the set of lanes being a sub-set of an approach). Up to
32 intersections can be contained in a single map message.
Intersections are defined as collections of approaches, which are in turn defined as collection of related
lanes. Each intersection has a regionally unique ID associated with this. It may optionally have a name
string as well. A required reference point is used to define a precise position from which local offset values
are used to describe the geometry of the lanes. Other, optionally present reference points can be further
defined in the structures when needed to simplify extremely complex intersections.
Within each approach are descriptions of one or more lanes of various types including pedestrian lanes and
other types such as train tracks that may cross the intersection. Each of these can be related in terms of its
path and attributes (and in the SPAT its current status). A structure called nodeList is used to relate the
path of the lanes centerline with whatever degree of precision and number of data points are required.