 |
 |
|
SAE J2735-Draft-Rev29 [issued: 12-11-08]
-
290 -
This is an SAE Motor Vehicle Council draft document of the DSRC committee, subject to change.
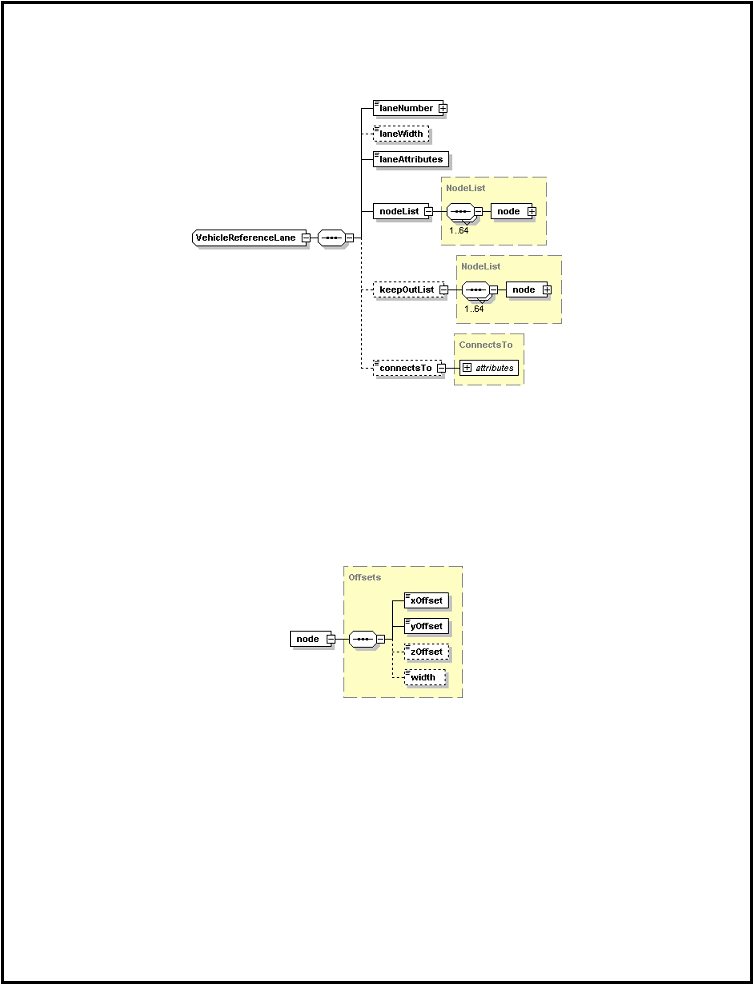
Here is the data structure of the driving lanes, used to relate the typical lane of traffic flow.
The laneAttributes is a bitstring which relates the allowed vehicle maneuvers such as noTurnOnRight etc.
In some complex cases (such as multiple soft left turns) the connectsTo data element can be present (in
ingress lanes) to further clarify how this lane interacts with the egress lanes.
The nodelist relates the path of the lane itself over the ground. The keepOutList is an optional further
overlay for places along the node list that the vehicle (or user) can not safely come to rest in (typical an area
marked do not stop or do not block on the ground). The nodelist itself it is made up of a sequence of from
one to 64 node points as shown below which relate the path in increments (precision) of 1.0 cm units. The
width or zOffset points, when present, establish a new standing value for that item until a subsequent
update, in a manner similar to the anchor points.
This collection of lane data is repeated for every lane to be described in the intersection. This consist of at
least all drivable lanes approaching the intersection and may include those lanes leaving the intersection
(egress lanes) and other supporting information (such as pedestrian lane details) as determined by the
message author.
In addition to the above, two optional structures (preemptionZones and priorityZones) are provided to
support priority and preemption requests at the intersection. These two items are used to determine which
specific request to make. They allow mapping of the intersection geometry into specific request zones and
values (0~7). They are identical in structure, using sets of the the SignalControlZone, shown below.