 |
 |
|
SAE J2735-Draft-Rev29 [issued: 12-11-08]
-
289 -
This is an SAE Motor Vehicle Council draft document of the DSRC committee, subject to change.
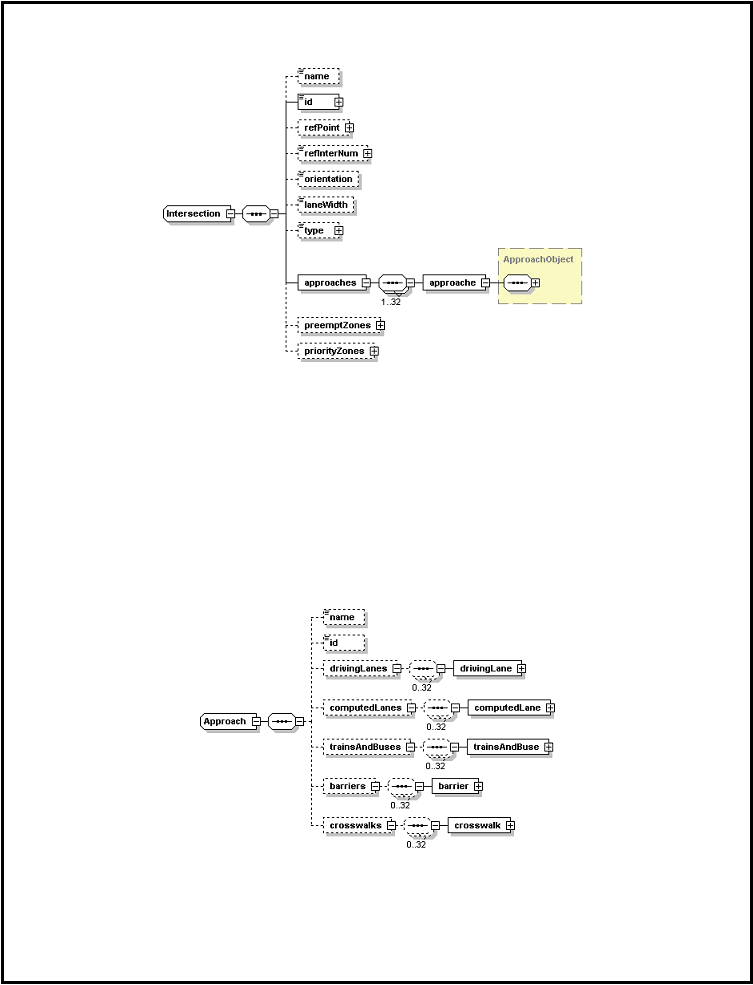
The ApproachObject structure allow arbitrary groupings of lanes to be created, as determined by the
designer. Lanes in this context refers to both driven vehicle use type lanes as well as several other lane
types defined by the standard. Lanes defined at this time include “pedestrian” lanes (cross walks) and
“special” lanes for shared lanes, rail track and other multi-modal uses, and “barriers” for various dividers.
Approach lanes are further divided into approach (ingress, incoming) and egress (outgoing) lanes, allowing
a clear division of the lanes coming into an intersection. Egress lanes are in fact optional and may
discarded under certain conditions when not needed
Within each approach are descriptions of one or more lanes of various types. Each of these can be related
in terms of its path and attributes (and in the SPAT its current status). A structure called nodeList is used
to relate the path of the lanes centerline with whatever degree of precision and number of data points are
required (including changes in width and elevation as needed).